info@biomedres.us
+1 (502) 904-2126
One Westbrook Corporate Center, Suite 300, Westchester, IL 60154, USA
Site Map

Received: September 09, 2023; Published: October 18, 2023
*Corresponding author: Leonid Shaikhet, Department of Mathematics, Ariel University, Ariel 40700, Israel
DOI: 10.26717/BJSTR.2023.53.008392
This paper continues the study of the asymptotic properties of the known SAIRP epidemic model under stochastic perturbations. The SAIRP epidemic model is described by a system of five nonlinear differential equations. It is assumed that the system is influenced by stochastic perturbations that are of the type of white noise and are proportional to the deviation of the current system state from one of the system equilibriums. It is shown that sufficient conditions of stability in probability for two different equilibria of the considered system are formulated via a simple linear matrix inequality (LMI), that can be easily studied via MATLAB. Two demonstrative examples illustrate the obtained results via numerical simulation of solutions of the considered system of five nonlinear Ito’s stochastic differential equations. The research method used here can be applied to a lot of other more complicated models in different applications.
Keywords: Equilibria; Stability in Probability; Asymptotic Mean Square Stability; Lyapunov Function; Linear Matrix Inequality (LMI); Numerical Simulation
During the last years investigations of epidemic models are very popular in research (see, for instance, [1-3] and the references therein). The so-called SAIRP epidemic model is defined by the following system of ordinary differential equations [1]:
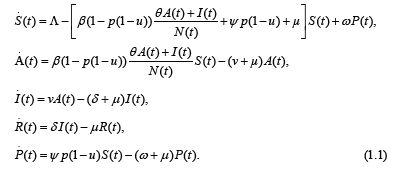
Here it is supposed that the population is subdivided into five distinct classes: susceptible individuals (S(t)); asymptomatic infected individuals (A(t)); active infected individuals (I(t)); removed (R(t)); protected individuals (P (t)). The total population, N (t) = S(t) + A(t) + I(t) + R(t) + P (t), with t ≥0 has a variable size, where the recruitment rate Λ and the natural death rate µ are assumed to be constant. The susceptible individuals S(t) become infected by contact with active infected I(t) and asymptomatic infected individuals A(t), at a rate of infection

In [1] some properties of stability of the system (1.1) equilibria are studied. Below, following the method from [4], stability in probability of two equilibria of the system (1.1) is investigated by the assumption that the system (1.1) is exposed to stochastic perturbations that are of the type of the white noise and are directly proportional to the deviation of a system state from an appropriate equilibrium.
Assuming that all variables in the system (1.1) are constants, we obtain that the equilibria of the system (1.1) are defined by the system of algebraic equations
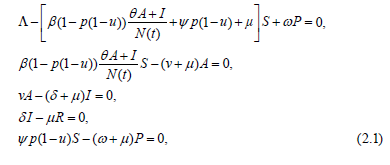
with the solutions: disease-free equilibrium
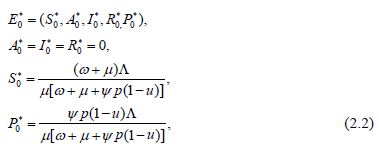
and endemic equilibrium

where the basic reproduction number R0 > 1,

Note also that, summing all equations of the system (2.1), we obtain

Let {Ω, 𝔉, P} be a complete probability space, {𝔉t, t ≥ 0} be a nondecreasing family of sub-σ-algebras of 𝔉, i.e., 𝔉t1 ⊂ 𝔉t2 ⊂ 𝔉 for t1 < t2, E be the mathematical expectation with respect to the measure P.
Let us suppose that the system (1.1) is exposed to stochastic perturbations that are of the type of the white noise and are directly proportional to the deviation of the system state (S(t), A(t), I(t), R(t), P (t)) from one of the equilibria (S*, A*, I*, R*, P*). As a result, we obtain the system of Ito’s stochastic differential equations [5]
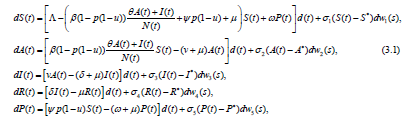
where σ1, ..., σ5 are constants and w1(t), ..., w5(t) are the mutually independent 𝔉t -adapted standard Wiener processes.
Note that the equilibrium (S*, A*, I*, R*, P*) of the deterministic system (1.1) is also the solution of the system of Ito’s stochastic differential equations (3.1). Stochastic perturbations of this type were first proposed in [6] for SIR epidemic model and later also for a lot of other different applied models (see [7] and the references therein).
Consider the nonlinear differential equation

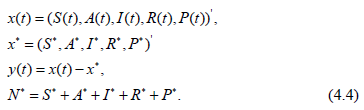
where x(t) ∈ Rn and the equation F(x) = 0 has a solution x∗ that is an equilibrium of the differential equation (4.1). Using the new variable y(t) = x(t) − x∗, represent the equation (4.1) in the form

It is clear that stability of the zero solution of the equation (4.2) is equivalent to stability of the equilibrium x* of the equation (4.1).
Let





of the nonlinear differential equation (4.2). So, a condition for the asymptotic stability of the zero solution of the linear equation (4.3) is also a condition for the local stability of the equilibrium x* of the initial nonlinear equation (4.1).
To construct the linear approximation of the system (3.1) let us put (′ is the sign of transpose)
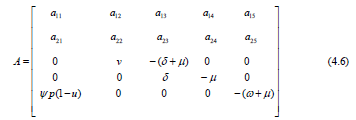
Representing the system (1.1) in the form (4.1) and calculating the Jacobian matrix, we get the linear part of the system (3.1) in the form.

where Bi is the matrix with all zero elements besides of bii = σi, i = 1,…5, and
with
and
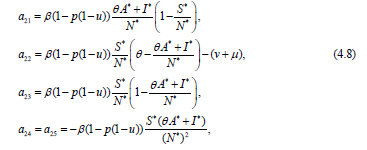
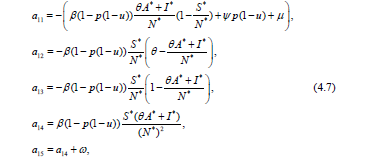
In particular, for the equilibrium E∗0 the elements (4.7) and (4.8) of the matrix (4.6) are
and

Remark 1 Let V = V (z) be a twice differentiable function of z∈R5. The generator of the equation (4.5) has the form [5]

Definition 1
Put y(t) = (S(t), A(t), I(t), R(t), P(t))-(S*, A*, I*, R*, P*). The solution (S*, A*, I*, R*, P*) of the system (3.1) is called stable in probability if for any there exists such that y(t) satisfies the condition 
Definition 2
The zero solution of the equation (4.5) is called:
-mean square stable if for each ε > 0 there exists a δ > 0 such that


-asymptotically mean square stable if it is mean square stable and for each initial value z(0), such that


Remark 2
It is known [7] that sufficient conditions for asymptotic mean square stability of the zero solution of the linear part of a stochastic nonlinear system with the order of nonlinearity higher than one at the same time are sufficient conditions for stability in probability of the initial nonlinear system solution. So, for investigation of stability in probability of the equilibrium (S*, A*, I*, R*, P*) of the system (3.1) it is enough to get conditions for asymptotic mean square stability of the zero solution of the linear equation (4.5).
Theorem 1
Let for the matrices A and Bi, i = 1,…,5, of the equation (4.5) there exists a positive definite matrix P such that the following linear matrix inequality

holds. Then the equilibrium (S*, A*, I*, R*, P*) of the system (3.1) is stable in probability.
Proof
Let L be the generator [5] of the equation (4.5). Using the Lyapunov function V (z) = z'Pz via (4.11) we have

So, if the linear matrix inequality (5.1) holds then via (5.2)

Example 1 Putting

from (2.4) and (2.2) we obtain R0 = 0:6371 and N0=15.
S0∗ , A0∗ , I0∗ , R0∗ , P0∗ ) = (12.5445,0,0,0,2.4555). (5.4)
Via MATLAB the following maximal values of the white noise levels were obtained, for which the LMI (5.1) holds and, therefore, the equilibrium (5.4) is stable in probability: σ1 = 1.4, σ2 = 0.93, σ3 = 1.2, σ4 = 1.4, σ5 = 1.4.
In Figure 1 100 trajectories of the solution of the system (3.1) are shown with the initial values S(0) = 22, A(0) = 11, I(0) = 4, R(0) = 8, P(0) = 17. All trajectories (S(t)-brown, A(t)-violet, I(t)-blue, R(t)-red, P(t)-green) converge to the stable in probability equilibrium (5.4).
Example 2 Putting
from (2.4) and (2.3) we obtain R0 = 1:3541 and N0=15.
(S0∗ , A0∗ , I 0∗ , R0∗ , P0∗ ) (10.8264,3.3317,0.4509,0.1488,0.2422). (5.6)
Figure 1

Via MATLAB the following maximal values of the white noise levels were obtained, for which the LMI (5.1) holds and, therefore, the equilibrium (5.6) is stable in probability: σ1 = 1.5, σ2 = 0.79, σ3 = 1.2, σ4 = 1.3, σ5 = 1.3.
In Figure 2 100 trajectories of the solution of the system (3.1) are shown with the initial values S(0) = 7, A(0) = 4.5, I(0) = 9, R(0) = 5.5, P(0) = 2.7. All trajectories (S(t)-brown, A(t)-violet, I(t)-blue, R(t)-red, P(t)-green) converge to the stable in probability equilibrium (5.6).
Figure 2

Remark 3
Note that for the numerical simulation of the Wiener process trajectories in Examples 1 and 2 a special algorithm has been used, described in detail in [7].
Asymptotic properties of the SAIRP epidemic model, described by a system of five nonlinear differential equations, are studied under stochastic perturbations. It is shown that a sufficient condition of stability in probability for two equilibria of the considered system is formulated using a simple linear matrix inequality (LMI) that can be easily studied via MATLAB. Two demonstrative examples illustrate the obtained results via numerical simulation of solutions of the considered system of five nonlinear Ito's stochastic differential equations. These simulations can be continued for getting more detail analysis of the considered epidemic model by real values of the system parameters in some real situations. The research method used here can be applied to a lot of other more complicated models in different applications.