 Mini Review
Mini Review
Abstract
Keywords: Soft Robotics; BCI; EEG; Sensorimotor Rhythm; Personalized Medicine; Neurorehabilitation
Introduction
Soft robotics refers to robotic systems made of materials similar in softness to human soft tissues. Recent medical soft robot designs, including rehabilitation, surgical, and diagnostic soft robots, are categorized by application and reviewed for functionality. Each design is analyzed for engineering characteristics and clinical significance [1].
Studying each design for each patient is known as personalized medicine or precision medicine. Personalised medicine is a medical model that separates people into different groups with medical decisions, practices, interventions and/or products being tailored to the individual patient based on their needs [2,3]. The concepts of personalized medicine can be applied to new and transformative approaches to health care.
One of these innovative approaches can include soft robotics since it has high performance potential in situations where the kinematic parameters of the system are not defined in advance [4] making it suitable for a tailored finger exoskeleton fitting patient’s need. Finally, soft robotics has particular utility for medical applications providing safer and more robust interactions than are currently available with conventional robotics; adaptive behaviors that use mechanical intelligence and therefore simplify the controllers needed for physical interaction; and cheaper and simpler robotic components [5].
Brain Computer Interface (BCI) technology is a set of tools that allow a user to control an external device using only his brain, with no muscle’s involvement. In the last years, it became attractive in the field of assistive technologies, especially for motor rehabilitation [6]. The field of assistive technologies for motor rehabilitation is taking advantage by the introduction of electrophysiological signals to control robotic devices.
One of the most used control signals for BCI applications is the ElectroEncephaloGram (EEG). EEG-based Brain-Computer Interface (BCI) has shown its effectiveness for the purpose of enhancing robot-assisted rehabilitation training [7,8].
User’s intent is generally interpreted extracting distinguished features of EEG signals, called Event-Related Potentials (ERP) [9], which occurs in the brain in response to specific cognitive, motor or sensory processes. One of the most used ERP used in BCI applications is the Sensorimotor Rhythm (SMR), elicited during motor imagery tasks. SMRs are very well-known rhythms in the brain observed in EEG signal around 8-12 Hz or 18-26 Hz over the sensorimotor cortex. SMR increase immediately after an active movement is performed and decrease before and during the execution of the movement itself. These phenomena are called Event-Related Desynchronization (ERD) and Event-Related Synchronization (ERS), respectively [10].
This paper aims to introduce conceptual design of a tailored BCI controlled soft finger exoskeleton for patient’s needs modelled around one specific user finger with the help of a 3D scanning procedure, maintaining a light structure and the easiness to wear it. The use of an EEG-based BCI to control the designed finger exoskeleton will help people to faster recover from transient motion impairments or to restore grasping skills in people with permanent motor disabilities.
Tailoring the Design
The finger anatomy can be perceived as a cable-driven mechanism in which the cables are represented by the tendons and the mechanisms by the finger itself with its joints and its links. Thus, this natural mechanism does not need another complex one to help him to regain its functionalities, an interesting solution is trying to build a bioinspired flexible exoskeleton embracing the finger and using its anatomical structure as mechanical constraint for the mechanism [11].
It is not possible to design a model considering mean anthropometric sizes values taken from a huge data population since these parameters differs among patients and each small difference can injure the patient. Thus, a 3D scan of the user’s hand is a suitable solution to achieve this goal. Figure 1 shows a scanned frame of one subject’s hand using Kinect v2 for the 3D acquisition.
After the scan is complete, the exoskeleton is modelled around the surfaces generated from the acquisition. Finally, a prototype can be manufactured using Rapid Prototyping technology and Thermoplastic Polyurethane (TPU) flexible plastic. Figure 2 shows the manufactured prototype.
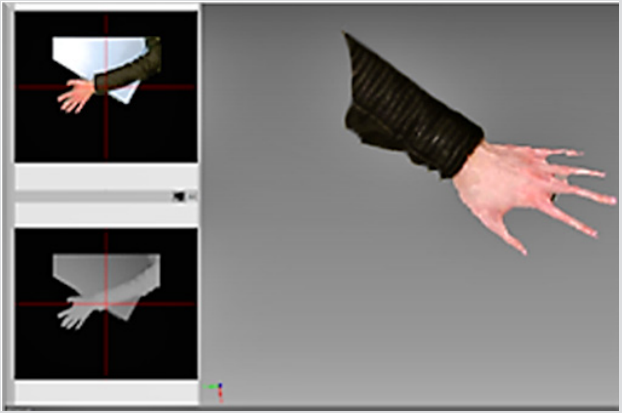
Figure 1: Tailoring procedure using Kinect v2 for acquisition.
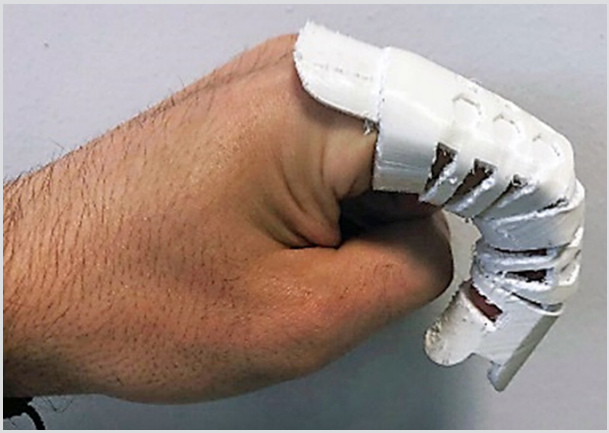
Figure 2: Manufactured soft finger exoskeleton prototype.
Control Design Through BCI
A typical BCI session usually consists of a training phase in which the subject performs a specific task to elicit a predefined ERP (SMR in our case) and a testing phase in which the subject is able to control external environment using the features extracted in the training phase. Figure 3 shows a typical BCI system. It consists of three main blocks: a signal processing block, where the system processes brain signals; a feature extraction block, in which the system extract specific features from the acquired brain signals; a feature classification block, in which the system translates recognized features in commands for the output device using machine learning and statistical approaches.
An open source BCI platform called BCI2000 [12] will be used for the purpose. BCI2000 allows to acquire and process brain signals in real-time and also offers many tools to analyze brain signals for BCI applications. As many training sessions as needed will be performed in order to reach a good accuracy in recognizing SMR.
Subjects will wear an EEG cap with 8 active electrodes (F3, F4, T7, C3, Cz, C4, T8, Pz), according to 10-20 international system and will be connected to a g.USBampEEG amplifier (256Hz sampling rate, g.tecGuger Technologies) for EEG signal acquisition. During the training phase, the subject will seat in front of a computer screen and will perform a simple motor task. After few training sessions, an offline analysis of the acquired signals will be performed using the BCI2000 Offline Analysis tool.
On the basis of the coefficient of determination R2, which measures the total signal variance determined by the task condition (in this case, the presence of SMR component), the channels that best discriminate the two conditions (movement vs rest) will be selected. Once an accuracy in detection SMR of over 90% is achieved, the testing phase will be performed. During the testing phase, the subject will try to control the exoskeleton with his brain, using the features extracted during the offline analysis. The exoskeleton will be connected to the BCI system in order to be controlled using subject’s intent. Figure 4 shows the complete setting and all the different phases.
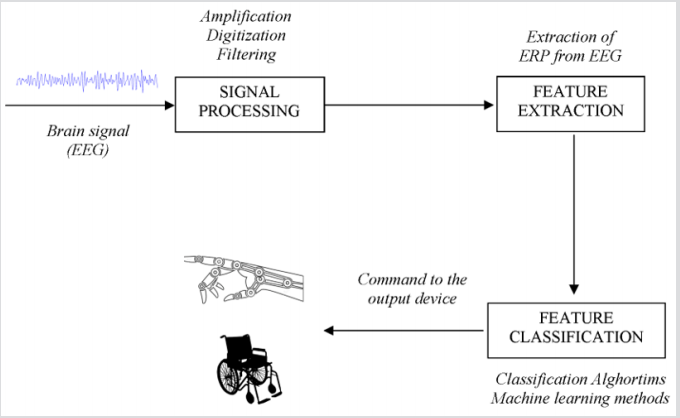
Figure 3: A typical BCI system.
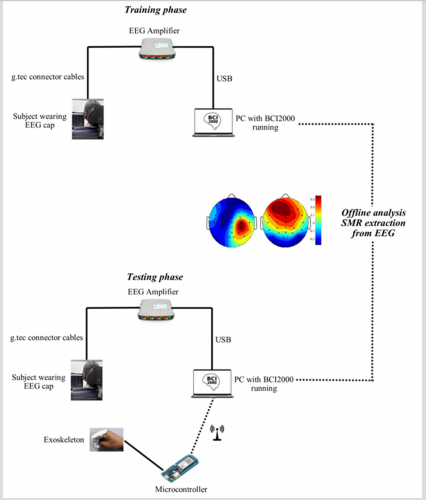
Figure 4: BCI setting.
Conclusion
A tailored BCI controlled soft finger exoskeleton for patient’s needs starting from a 3D scan of the user’s hand has been presented and analysed. A preliminary prototype has been built using TPU material to check the feasibility of the conceptual design giving satisfactory results in terms of motion and safety. An EEG-based BCI setting is presented and built to control the exoskeleton with user’s intent. The final goal in future works will be having a tailored hand exoskeleton that is low-cost and easy to use and to manufacture. A big effort should also be done in order to minimize the duration of training phase and to develop a system which is not dependent from the subject and ready to use. Finally, this study will lead to a tailored hand exoskeleton with more Degrees of Freedom (DoFs) giving more versatility in tasks that can be performed and better chances for improving patients’ life.
References
- Tse ZT H, Chen Y, Hovet S, Ren H, Cleary K, et al. (2018) Soft robotics in medical applications. Journal of Medical Robotics Research 3(03n04): 1841006.
- Abrahams E, Silver M (2009) The case for personalized medicine. J Diabetes Sci Technol 3(4): 680-684.
- Smith Richard (2012) Stratified, personalized, or precision medicine. BMJ 39: 143-158.
- Deimel R, Brock O (2015) A novel type of compliant and underactuated robotic hand for dexterous grasping. The International Journal of Robotics Research 35(1-3): 161-185.
- Kim S, Laschi C, Trimmer B (2013) Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol 31(5): 287-294.
- . Ang KK, Guan C (2013) Brain-computer interface in stroke rehabilitation. Journal of Computing Science and Engineering 7(2): 139-146.
- Bai O, Lin P, Vorbach S, Floeter MK, Hattori N, et al. (2008) A high performance sensorimotor beta rhythm-based brain-computer interface associated with human natural motor behavior. J Neural Eng 5(1): 24-35.
- Müller-Putz GR, Scherer R, Pfurtscheller G, Rupp R (2005) EEG-based neuroprosthesis control: A step towards clinical practice. Neurosci Lett 382(1-2): 169-174.
- Sur S, Sinha VK (2009) Event-related potential: An overview. Ind Psychiatry J 18(1): 70.
- Jonathan Wolpaw, Elizabeth Winter Wolpaw (2012) Brain-computer interfaces: Principles and practice. Oxford University Press, USA, pp. 227-240.
- Cafolla D (2019) A personalized flexible exoskeleton for finger rehabilitation: A conceptual design. Advances in Mechanism and Machine Science 7: 73-82.
- Schalk G, McFarland DJ, Hinterberger T, Birbaumer N, Wolpaw JR (2004) BCI2000: A general-purpose brain-computer interface (BCI) system. IEEE Trans Biomed Eng 51(6): 1034-1043.
